1 / 5
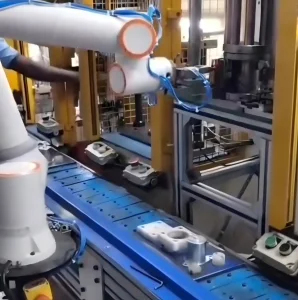
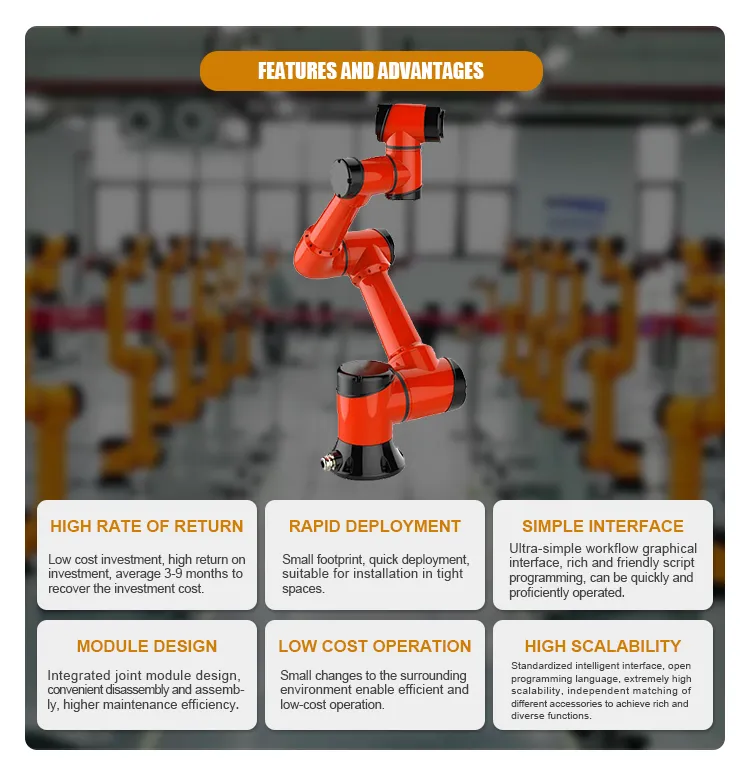
The Collaborative Robotic Arm 6 axis adopts BUS protocols and is designed for high-precision tasks such as Laser Welding, Cutting, Painting, and Assembly. As a versatile cobot, it is easy to program and significantly safer than traditional industrial robots.


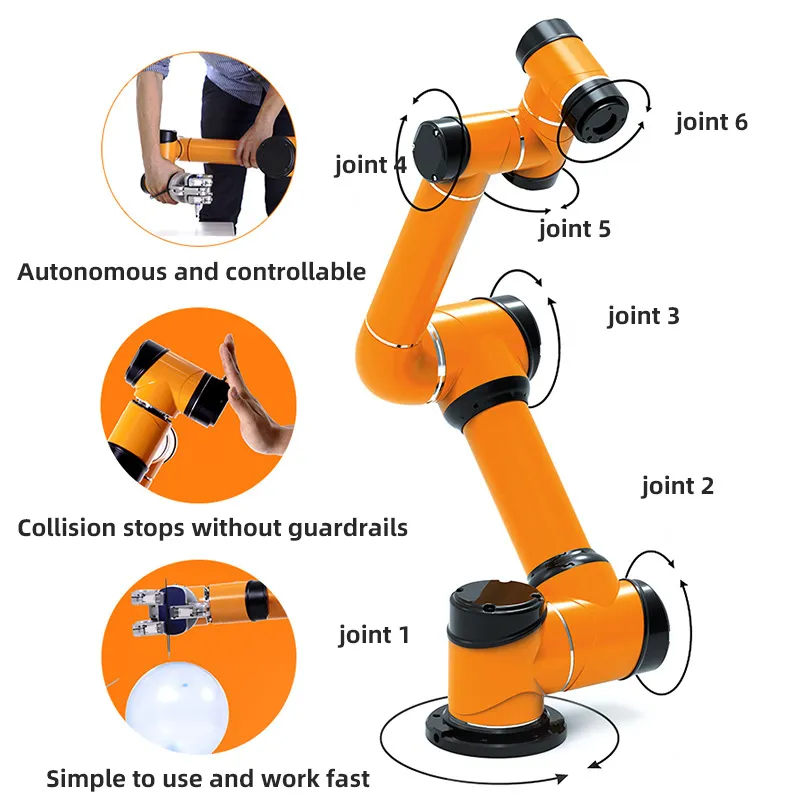
Program your robot without complex coding skills. Simply drag and drop the arm to desired positions or use graphical blocks in the APP. The intuitive process takes only minutes to remember and follow exact paths.
Compact and light, this model integrates the reducer, motor, encoder, and drive controller as a single unit, greatly improving installation convenience and redeployment speed.
Human-friendly design allows work alongside operators without fences. It supports collision detection control, creating a safe environment without impacting production efficiency.
| Specification | Details |
|---|---|
| Maximum Reach | 625 mm |
| Maximum Payload | 3kg |
| Pose Repeatability | ± 0.03 mm |
| Number of Axes | 6 |
| Protection Rating | IP54 |
| Material | Aluminum Alloy |
| Power Consumption | 150W |
| Power Supply | DC 48V |
| Communication Protocol | CAN bus, Ethernet, Modbus-RTU/TCP |

Our products undergo strict 100% inspection before packaging and shipment to guarantee high reliability.

We provide total solutions including CNC Controllers, Robot Arms, Servo Motors, and Drivers specialized for various industrial applications.
Every product undergoes professional full testing by engineers and a final 100% inspection before shipment to ensure high standards.
Cobots like the SZGH-I3 are designed for safety, allowing humans to work alongside robots without fences. They offer easy programming and quick redeployment for various tasks.
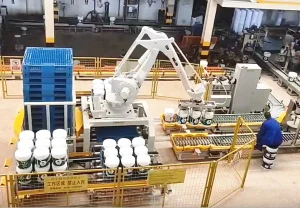
They are widely used for materials handling, parts transfer, palletizing, deburring, grinding, cutting, and assembly across automotive and electronics industries.
Standard goods are typically produced and ready within 5 to 7 workdays, though customized products may require additional time.
Yes, the hardware adopts BUS protocols and supports ROS (Robot Operating System) compatibility through an API for flexible integration.